

Mikrolar Robot
This video demonstrates the Mikrolar robot’s 6 degrees of freedom. In the video, you are able to see the robot:
-
Spin (rotates about the Z axis)
-
Slide right to left (translates about the X axis)
-
Slide front to back (translates about the Y axis)
-
Move up and down (translates about the Z axis)
-
Wobble forward and back (rotates about the X axis)
-
Wobble side to side (rotates about Y axis)
-
Lastly, a combination of translation in the X and Y plane.
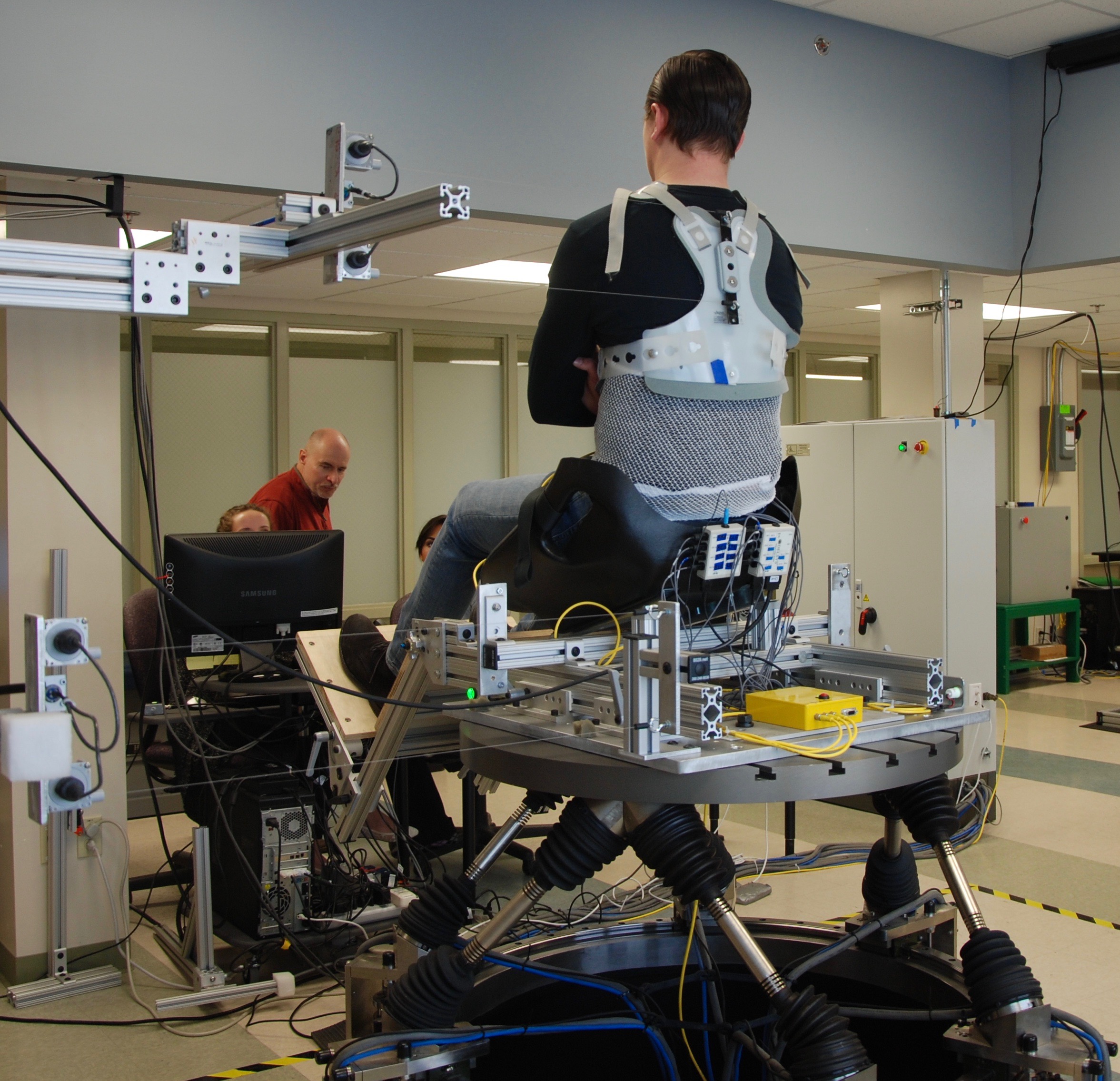
Trunk Position Tracking
This is a task for our back project called Trunk Position Tracking. The participant wears a modified vest that allows string pots to be attached while they are buckled into the Mikrolar seat. When the string pots are attached to the back of the vest, the participant’s movement can be translated to a red dot on the screen. Leaning back would cause the red dot to move up, while leaning forward would cause the red dot to move down (extension and flexion movements respectively). The goal of the task is to follow the green arrow as quickly and accurately possible with the red dot.
Trunk Position Stabilization
This is a task for our back project called Trunk Position Stabilization. The participant wears a modified vest that allows string pots to be attached while they are buckled into the Mikrolar seat. When the string pots are attached to the back of the vest, the participant’s movement can be translated to a red dot on the screen. Leaning back would cause the red dot to move up, while leaning forward would cause the red dot to move down (extension and flexion movements respectively). While the robot wobbles beneath the participant, the goal of the task is keep the torso upright (as if the participant were balancing books on their head).
Trunk Force Tracking
This is a task for our back project, called Trunk Force Tracking (Flexion). The participant is seated with a pad (load cell) positioned at their chest while they are buckled into the Mikrolar seat. When the participant pushes against the pad, the force can be translated to a red dot on the computer screen. Leaning into the pad with the torso would cause the red dot to move up (flexion), relaxing away from the pad would cause the red dot to move down. The goal of the task is to follow the green arrow as quickly and accurately as possible with the red dot.
Trunk Force Stabilization
This is a task for our back project, called Trunk Force Stabilization (Flexion). The participant is seated with a pad (load cell) positioned at their chest while they are buckled into the Mikrolar seat. When the participant pushes against the pad, the force can be translated to a red dot on the computer screen. Leaning into the pad with the torso would cause the red dot to move up (flexion), relaxing away from the pad would cause the red dot to move down. While the robot wobbles beneath the participant, the goal of the task is keep the red dot on the green arrow in the middle of the screen.
Neck Tracking (Rotation)
This is a task for our neck project called Rotation Tracking. The participant wears a modified helmet that allows string pots to be attached, while the torso is fixed to a backrest to minimize the influence of other muscles. When the string pots are attached to the side of the helmet, the participant’s movement can be translated to a red dot on the screen. Looking left would cause the red dot to move left, while looking right would cause the red dot to move right (rotation left and right). The goal of the task is to follow the green arrow as quickly and accurately as possible with the red dot.
Neck Force Tracking
This is a task for our neck project, called Force Extension Tracking. The participant is seated with a force plate positioned at the back of the head, while the torso is fixed to a backrest to minimize the influence of other muscles. When the participant pushes against the force plate, the force can be translated to a red dot on the computer screen. Pushing into the pad with the back of the head would cause the red dot to move up (extension), relaxing away from the pad would cause the red dot to move down. The goal of this task is to follow the green arrow as quickly and accurately as possible with the red dot.