

MSUCOR Compliant Robot
The custom-built MSUCOR compliant robot allows the operator to adjust postural stability demands by regulating the stiffness of the seat. As the seat stiffness is reduced, it becomes increasingly more difficult to maintain balance. The speed of postural control can be assessed by identifying the critical stiffness at which postural instability occurs. People with fast postural control can maintain balance at a lower seat stiffness.
Seated Balance
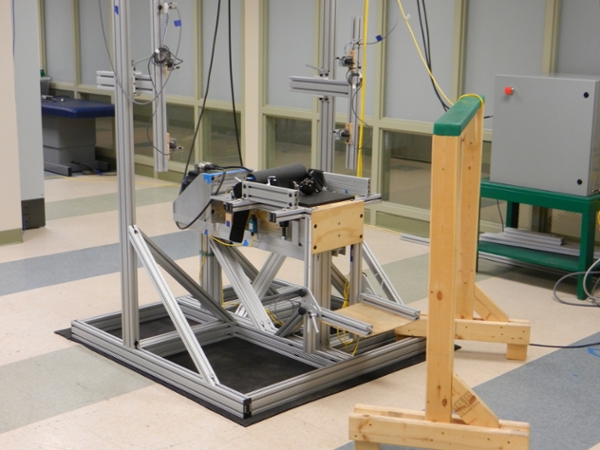
The robotic device for assessing postural control in an unstable sitting task.
Compliant Robot
The assessment of critical stiffness in postural control in unstable sitting task. The operator gradually decreases seat stiffness until the subject is no longer able to maintain balance.